Inference settings contain two important parameters; Instance length and Classification interval. In this blog, we will explain the Classification Interval and in conjunction with raw sensor signals, ODR, Instance length, latency, and performance of the model on the embedded target.
Classification Interval is the step–size for each on-device classification, i.e., live testing. This interval determines “how often” we do on-device classification as shown in the plot below. For example, if Classification Interval is set to 200 milliseconds, Qeexo AutoML will produce a classifier that classifies incoming data at a rate of 5 Hz (5 times / second).
In the plot below, Instance Length (in milliseconds) determines how many milliseconds of sensor data are taken into account for each classification. Depending on the maximum sensor ODR selected for the use case, instance length in milliseconds gets converted into the number of raw sensor data samples. For example, 250 milliseconds of instance length is essentially 238 raw sensor data samples if sensor ODR is 952 Hz.

Please note that the true classification interval can never be less than the classification latency (the amount of time needed to calculate a single classification result). So, if the requested classification interval is less than the classifier latency, the true classification interval will necessarily be larger than the requested one; as the next classification will not begin until the current one is finished.
There are 3 different relational cases between Classification Interval and Instance length which are described below.
Case 1: Classification Interval < Instance Length
Below case shows on-device classification with Classification Interval < Instance Length. This will result in overlapping of instances, i.e., some “overlap” of data between 2 classifications.
This choice of parameters may be appropriate for detecting short-lived transient events.

Case 2: Classification Length = Instance Length
Below case shows on-device classification with Classification Interval = Instance Length. This will result in no “overlap” of data between 2 classifications. Although, there will be no gap between 2 classifications.
This will reduce the rate of classification and depending on the application use-case, if it involves working with high ODR sensors, may result in missing some transitional data.

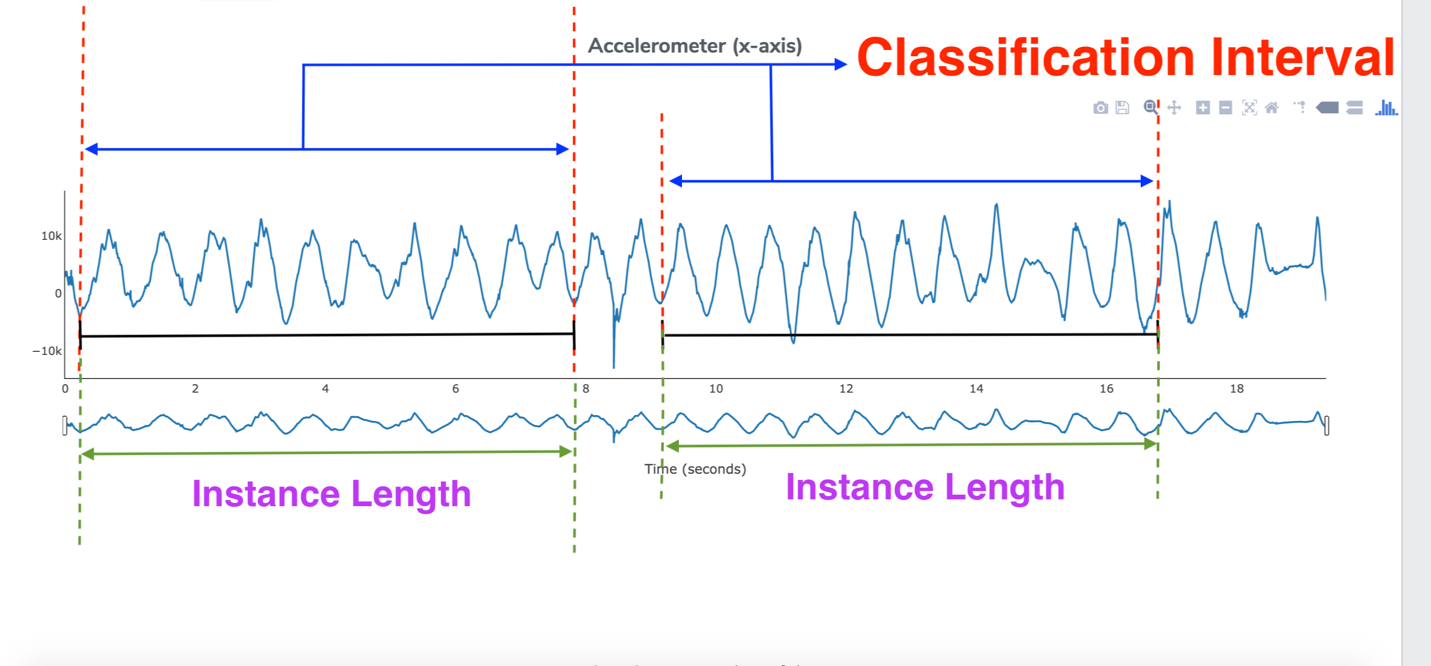
Case 3: Classification Interval > Instance Length
Below case shows on-device classification with Classification Interval > Instance Length. This will result in no “overlap” of data between 2 classifications and there will be a gap between 2 classifications.
This gap will manifest in even “slower” classifications (in comparison to Cases 1 and 2 described above) and might result in missing some transitions or classes completely.
This choice of parameters may be appropriate for monitoring the state of long-running machinery, where an anomalous state is expected to persist for some time. The larger classification interval has the advantage of reducing power consumption.
